文章来源:智车行家整理自兴业证券行业报告
导读
双目视觉:仿人眼原理,赋能立体感知:3D 感知技术可以分为单目视觉、双目视觉、多目视觉、ToF、结构光、激光三角测量法等。双目视觉相较于单目视觉获得更精准的测距能力,相较于激光雷达其摄像头成本更低。
双目视觉应用:“智能驾驶、人形机器人、无人机”三大场景加速渗透:(1)在智能驾驶领域,双目视觉助力实现低成本高阶智能驾驶,国内已有多个品牌推出纯视觉方案,且价格友好。(2)在人形机器人领域,双目视觉可提供丰富的三维空间信息与纹理细节,在人形机器人近距离环境感知中具有显著优势。(3)在无人机领域,双目视觉可解决无人机测地高度和自主避障两大痛点,本文针对双目视觉相关公司梳理包括:元橡科技、奥比中光、保隆科技、海康威视等。
【目录】
1、双目视觉:仿人眼原理,赋能立体感知
3D 感知:涵盖双目视觉、ToF、结构光等多类技术
双目视觉优势:性能优良,结构简洁,成本较低
2、应用:“智能驾驶、人形机器人、无人机”三大场景加速渗透
智能驾驶:双目视觉助力实现低成本高阶智能驾驶
人形机器人:双目视觉可实现“类人眼”感知效果
无人机:双目视觉解决无人机“测地高度+自主避障”痛点
3、双目视觉相关公司梳理
双目视觉:仿人眼原理,赋能立体感知
3D 感知:涵盖双目视觉、ToF、结构光等多类技术
3D 感知技术按照是否需通过投射光源来获取被测物体三维形貌信息,可以分为两大类:被动视觉和主动视觉。(1)被动视觉仅利用相机拍摄被测物的图像,建立被测物与相机之间的相对位置关系,从而获取被测物表面的三维信息。根据所采用相机的数目,被动视觉可分为单目视觉、双目视觉和多目视觉等。
(2)主动视觉需要向被测物体投射光源(点、条纹、图案和散斑等),相机拍摄包含光源的反射光或透射光的被测物体表面图像,利用成像几何关系所建立的数学模型解算出被测物体三维结构信息。主动视觉法包括ToF、结构光、激光三角测量法等。
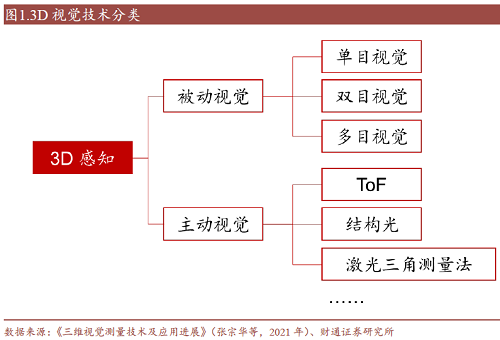
单目视觉:单目视觉通常通过获取大量的数据进行学习训练,基于先验知识就可以产生空间信息的判断。
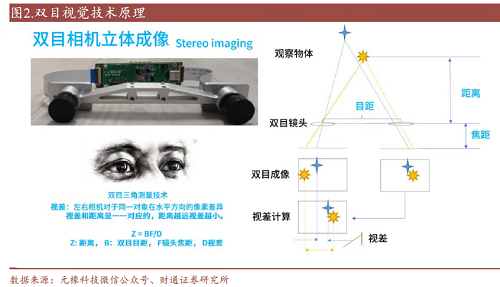
双目视觉:双目立体视觉的工作原理与人眼进行深度感知的原理类似,其具体原理是三角测量技术,通过从两个视点观察同一物体,从而获得同一物体在不同视角下的图像。左右相机对于同一对象在水平方向的像素差异叫做视差(D),结合双目目距(B)、镜头焦距(F),通过 Z=BF/D 的公式就可以得到物体距离(Z),有了距离之后还可以算出 X 和 Y 的值,因此基于双目就可以得到一个空间信息。
相较于单目视觉,双目视觉避免了系统对大量非标障碍物的学习和识别成本,并获得比单目更精准的测距能力;相较于激光雷达,双目摄像头不仅成本更低,且能获得比激光雷达更稠密的点云。
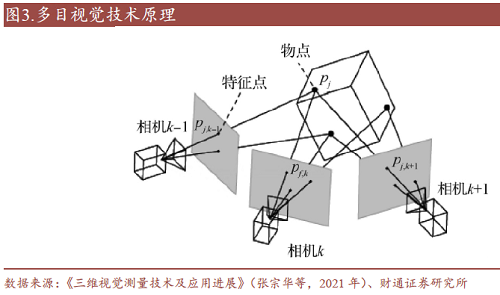
多目视觉:为减少双目立体视觉测量中同名像点匹配的多义性,在双目立体视觉测量系统的基础上,增加一台或多台辅助相机,即构成多目视觉测量系统。通过多个相机间需满足的成像几何约束可减少误匹配现象,且可以通过光束平差提高测量精度,但计算量也会相应增加,降低测量速度和效率。
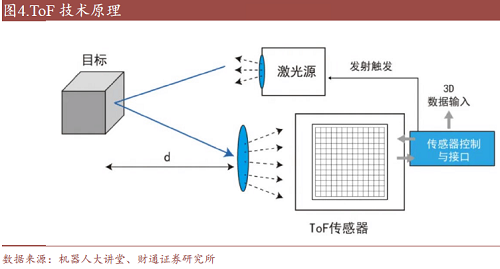
ToF:ToF(time-of-flight 飞行时间法)是通过给目标连续发射激光脉冲,利用传感器接收在被测平面反射的光脉冲,计算光脉冲往返时间,得到目标物距离。ToF可进一步分为 iToF(间接飞行时间法)和 dToF(直接飞行时间法)。
(1)iToF:是一种通过直接测量激光从发射到接收之间的飞行时间来实现距离测量的技术,主要包括发射端、接收端以及深度引擎芯片,发射端激光一般被调制成连续波和脉冲波两大类,接收端则通过 iToF 感光芯片来采集返回光信号,由处理电路实现相位差计算,并进一步对相位差进行滤波、转换等计算以获取深度图像。
(2) dToF:是一种通过直接计算脉冲光从发射到接收之间的飞行时间来实现距离测量的技术,主要包含激光发射端和单光子探测阵列芯片。激光发射端向目标发射脉冲光束,经物体反射后被单光子探测阵列芯片采集,获取脉冲光束的飞行时间,进一步计算以获取深度图像。
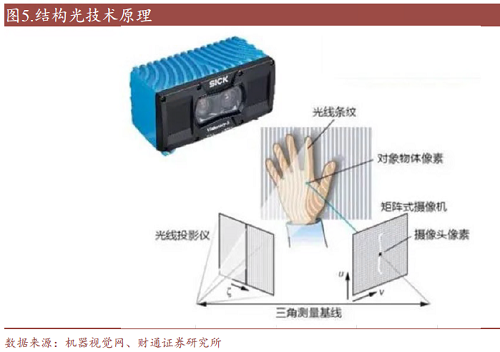
结构光:结构光原理是向物体投射出黑白相间的结构性光束,这些光束由于物体表面形状的不同而产生变形,表现在图像中则是结构性光束发生了变形和扭曲,即高差变化和不连续,高差变化的程度用于计算深度,不连续则显示出了物体表面的物理间隙,进而计算出物体的位置和深度等信息,最终复现三维空间。
激光三角测距法:激光三角测距法是通过图像采集系统,采集被测物表面漫反射的激光轮廓。基于设备已知的性对位置,通过算法处理,获得被测物表面的三维轮廓数据,以还原目标物体三维空间信息。
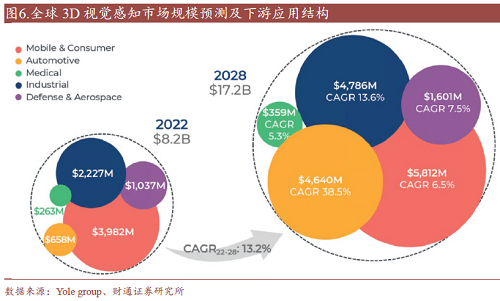
2028 年全球3D 感知市场规模有望超千亿元。根据Yole group 统计,2022 年全球3D 感知市场规模为 82 亿美元,随着智能驾驶、无人机、智能家居等应用领域的发展,预计 2028 年全球 3D 视觉感知市场规模将扩张至 172 亿美元(约合 1204亿元人民币),2022-2028 年复合增速达到13.2%;其中,到 2028 年,汽车领域应用规模将从 2022 年的 6.58 亿美元增长至 46.4 亿美元,年复合增速达 38.5%,占比提升至 27%。
双目视觉优势:性能优良,结构简洁,成本较低
双目视觉与单目视觉相比,优势在于无需先验知识。以汽车避障为例,单目视觉需要依据先验知识,对物体进行识别和分类,才能根据图像大小的变化来计算物体距离,而双目视觉避免了系统对大量非标障碍物的学习和识别成本。
双目视觉与多目视觉相比,优势在于结构配置更简单。以三目视觉为例,三目视觉系统要合理安置三个摄像机的相对位置,其结构配置比双目视觉系统更烦琐,而且匹配算法更复杂需要消耗更多的时间,实时性更差。
双目视觉与三种常用主动视觉法(结构光、激光三角测量、ToF)相比,优势在于性能优良同时保持低成本。双目视觉在分辨率、抗干扰能力、测量距离等方面均表现优良,且不需要结构光、TOF、激光等发射器和接收器,因此结构简单硬件成本低,适合成本敏感的应用场景。另外,双目视觉依靠自然光,可在室内外使用。

应用:“人形机器人、智能驾驶、无人机”三大场景加速渗透
人形机器人:双目视觉可实现“类人眼”感知效果
双目视觉技术模仿人类双眼视差原理,能够提供丰富的三维空间信息与纹理细节,在人形机器人近距离环境感知中具有显著优势。激光雷达虽具备厘米级测距能力,但无法直接获取图像信息(如颜色、纹理等),且其体积、功耗和成本在人形机器人应用中受到较大限制。此外,由于人形机器人主要在低速状态下工作(如室内服务场景),其对远距离轮廓和毫米级精度的需求相对降低,而更依赖视觉系统对近距离目标的快速语义理解与响应。
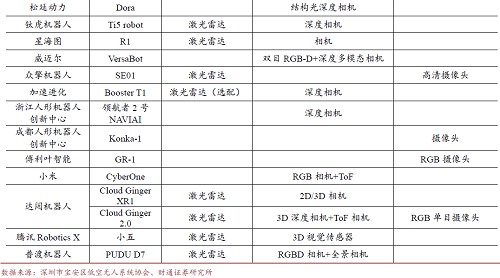
当前人形机器人厂商采用的视觉传感器方案大致可以分为两类:一是纯视觉方案这种方案依赖于摄像头和视觉算法进行环境感知,主要应用于特斯拉和小鹏等厂商的机器人:二是多传感器融合方案,该方案通过结合多个传感器(如深度相机、摄像头、RGB 相机、激光雷达、TOF 相机等)来增强机器人感知能力,应用于小米、智元、字树、优必选等厂商。
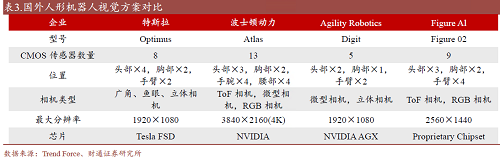
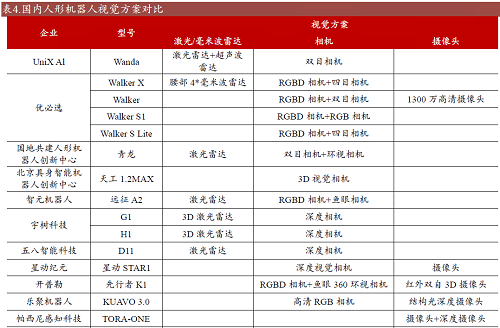
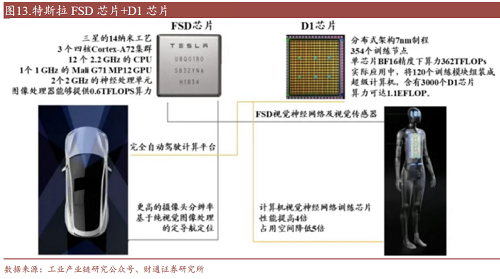
特斯拉Optimus:沿用其智驾纯视觉路径。特斯拉Optimus 采用纯视觉传感器方案,最初的Optimus 在硬件上设计了包括头部、肩部、腰部在内的8 颗摄像头,覆盖高位、中位、低位立体视觉;二代 Optimus 仅保留了头部的左中右三颗摄像头,并通过固定颈部设计提升画面稳定性。算法层面复用特斯拉汽车 FSD 技术,基于 Autopilot 神经网络实现实时环境感知与路径规划。其视觉系统依托自研 Dojo D1 芯片与超级计算机进行 AI 训练,通过多任务学习优化图像识别、深度估计与运动控制。
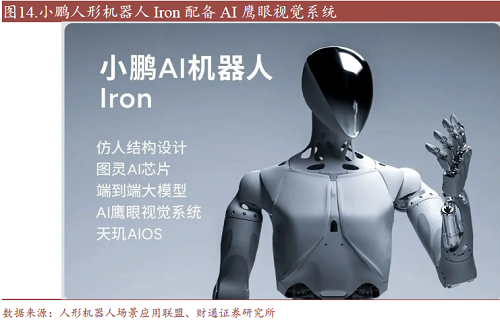
小鹏Iron:配备小鹏汽车AI 鹰眼视觉系统。2024 年11 月6 日,小鹏汽车发布了新一代人形机器人 Iron,配备小鹏的AI 鹰眼视觉系统,实现了720°无死角的环境感知。AI 鹰眼视觉系统核心技术为 LOFIC(横向溢出集成电容)技术,通过在光电二极管旁集成高密度电容,容纳溢出的光电子,显著提升摄像头在强光、暗光等复杂环境下的动态范围和成像清晰度。该系统搭载800万像素车载摄像头,官方称成像效果比人眼清晰10 倍,感知距离提升125%,识别速度提高40%。
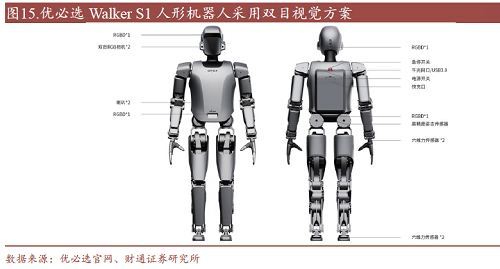
优必选:四目系统及双RGBD 传感器。优必选WALKER X 的视觉模块创新升级四目系统及双RGBD 传感器,采用胸部四目视觉,头部+腰部双 RGBD,以及腰部 4*毫米波雷达避障。该方案通过 SLAM 视觉导航算法实现环境理解,基于多目视觉传感器的三维立体视觉定位采用Coarse-to-fine 的多层规划算法,第一视角实景AR 导航交互及2.5D 立体避障技术实现动态场景下全局最优路径自主导航,实现定位精度10cm,导航精度20cm,精定位精度1cm。
智能驾驶:双目视觉助力实现低成本高阶智能驾驶
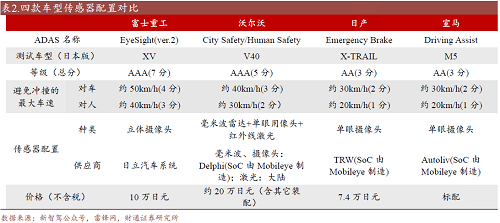
双目视觉用于智能驾驶,性能表现优秀,且成本低。根据2014 年日本的一份研究报告,对比富士重工、沃尔沃,日产和宝马四款车型各自传感器配置发现,在对车和行人的紧急自动制动实机测试中,双目具有较强优势,防碰撞安全等级排序为“双目>雷达+单目+激光>单目”。从成本角度来看,纯视觉方案(尤其是双目视觉方案)拥有更低成本,国外双目成本比单目贵 20%,但比雷达+单目+激光组合方案低 100%。

目前,自动驾驶视觉技术路线主要分为两大类:一是视觉主导的多传感器融合方案,另一种以低成本激光雷达为主导。视觉主导的环境感知技术采用多摄像头、毫米波雷达、超声波雷达和低成本激光雷达融合感知的方案。当前技术条件下,摄像机成像受环境光照的影响较大,基于人工智能的目标检测与定位可靠性仍然较低,但其优势在于传感器成本低。
特斯拉最新(2023 年)发布的 FSD HW4.0 版本硬件沿袭了纯视觉技术路线,搭载12 个500 万像素高分辨率摄像头,最远探测距离拓展至 424 米,并重新引入高精度 4D 毫米波雷达,以弥补纯视觉方案在极端天气或复杂光照条件下的局限性。
国内已经有多个品牌推出纯视觉方案,且价格友好。比亚迪天神之眼C 版本“二郎神”方案、卓驭(原大疆车载)的成行平台、华为的ADS SE(乾崑智驾基础版)等国产视觉方案覆盖车型价格已下探至约7 万元。相比之下,特斯拉FSD(HW4.0)套件入华选装价格高达6.4 万元。
比亚迪“天神之眼”:2025 年2 月10 日,比亚迪在深圳总部召开智能化战略发布会,发布高阶智能驾驶系统“天神之眼”。天神之眼C 版本“二郎神”方案创新采用双广角摄像头+长焦摄像头,物体探测精度1cm,高程感知时延低至30ms,最远探测距离可达350m。同时,天神之眼C 首批21 款车型上市,覆盖车型价格区间 6.98 万元-24.98 万元,包括了海鸥、海豚、海狮、海豹、秦、宋、元、唐、汉等车系,基本上做到了比亚迪王朝网和海洋网的全覆盖。


大疆“成行平台”:“成行平台”是大疆车载为车企提供的全场景智能驾驶解决方案,首次亮相于2023 年百人会年会。按照传感器构型+芯片算力的多阶梯配置划分,「成行平台」主要有三个量产版本:基础版 7V+32TOPS、升级版7V+100TOPS、高配版 10V+100TOPS。目前7V+32TOPS 基础版配置已在多款量产车型上搭载(宝骏云朵/iCAR03/宝骏悦也 plus),通过极致性价比将可搭载车型的门槛降低到了8 万元级别。

华为乾崑:2024 年4 月,华为乾崑发布乾崑智驾基础版方案ADS SE,该版本支持纯视觉但不含激光雷达,提供高速智驾领航辅助、智能泊车辅助等功能,并已实现搭载于15~20 万级别车型,推动更多中低端车型实现智驾平权。2024 年 9 月,深蓝 L07 正式上市,搭载华为乾崑智驾 ADS SE 纯视觉方案,价格低至16.69 万元。

无人机:双目视觉解决无人机“测地高度+自主避障”痛点
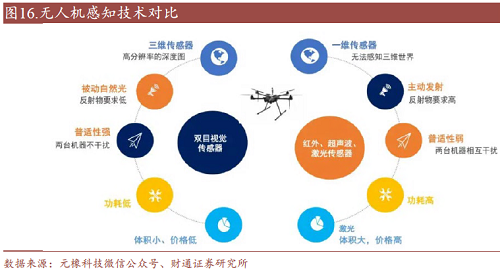
双目视觉用于无人机,可解决无人机测地高度和自主避障两大痛点。在测地高度方面,如贴地飞行(尤其是农业无人机进行撒药施肥需要精确控制对农作物的高度),无人机需获取更加可靠、分辨率更高的地面高度和地形,以便控制效果。在自主避障方面,激光和毫米波等传感器很容易遗漏细小障碍物(如树枝,细杆等)。相较于传统的红外、超声波激光传感器,双目视觉是被动自然光,本身是一个三维传感器,可以感知整个世界三维的尺寸信息和位置信息。相较于激光雷达,双目视觉能提供更丰富的信息,同时成本较低,性价比高。
自 2016 年 3 月大疆创新发布 Phantom 4 以来,国内厂商陆续发布应用双目视觉的无人机产品。
大疆 Phantom 4 Pro:三组双视觉传感器组成六目导航系统。2016 年 3 月,大疆发布 Phantom 4 Pro,成为行业标杆,其机身前、后方以及底部均配备双目视觉传感器,三组双视觉传感器组成六目导航系统,前后环境检测距离可达30 米,飞行中通过任意方向的双目视觉均可实现定位悬停。在避障功能开启时,Phantom 4 Pro 最高飞行速度可达 50km/h,满足高速航拍的要求。
大疆经纬 M300RTK:六向双目视觉+红外 ToF。2020 年 5 月,大疆发布经纬M300RTK,是业界首款具备六向双目视觉+红外 ToF 的无人机,可实现桥底、室内等复杂环境下的安全稳定飞行。六向视觉定位、系统最大探测范围达40 米,避障有效飞行速度可达17m/s、可自定义避障距离,狭小空间内也可灵活飞行。

极飞科技植保无人机:XCope“天目”无人机视觉系统。极飞科技发布XCope “天目”无人机视觉系统,该系统融合了双目避障和地形视觉模块,让植保无人机第一次拥有了感知环境的能力。XCope“天目”能够识别30 米以内的障碍物,感知环境信息,拥有夜视能力,在夜晚也能实现自动避障,还有专为植保作业设计以适应严苛作业环境的主动除尘功能。

道通智能Autel Alpha:五向双目鱼眼视觉+六向毫米波雷达。道通智能行业级无人机Autel Alpha 融合“五向双目鱼眼视觉+六向毫米波雷达”的多源传感器融合感知技术,具备 720°全方位感知和避障能力,并支持夜间避障,保障飞行安全,适用于公共安全、能源巡检等专业领域。

双目视觉相关公司梳理
下文对我国已上市/未上市双目视觉方案部分主要提供商进行梳理(不含汽车、机器人等领域中部分自研视觉系统的主机厂商)。
元橡科技:专注双目立体视觉
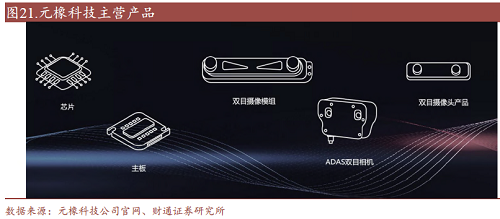
元橡科技是我国智能立体视觉芯片及解决方案提供商。元橡科技创立于2017 年,公司以自研智能立体视觉算法及芯片为核心,为车载(ADAS、自动驾驶、魔毯底盘) 、机器人(低速、家用)等领域客户及合作伙伴提供从芯片到软硬件一体的全栈解决方案,已实现大规模量产。公司双目立体视觉产品主要有双目视觉模块、通用性双目相机、车载ADAS 视觉模块、双目相机标准款、其他领域视觉模块等。主要产品应用分为通用级、车规级和消费级。
车载领域:元橡科技以纯视觉方案进入车载领域,开业界先河。公司车载领域产品可实现功能涵盖ADAS 辅助驾驶及各级别自动驾驶,车载ADAS 双目视觉产品应用于数十个车型。2019 年,公司ADAS 双目视觉产品不叠加其它技术通过国内JT/T 883-2014 测试,该测试是车载领域的重要门槛,是商用客车准入的标配,此前通过测试的ADAS 产品大部分为视觉与雷达融合方案。2025 开年,三目视觉方案正式走入智驾主流,其方案的基础是双目,作为领先的双目立体视觉方案提供商,元橡科技很早就布局了三目视觉方案,并于2024 年实现量产。

机器人领域:公司已与 10 余家国内外领军客户达成合作。2020 年,元橡科技在工业及消费级机器人领域进一步拓展,技术涵盖双目硬件、立体视觉识别、双目测量等,产品在主动跟随、主动避障、高精度 SLAM、智能交互等方面进一步延伸。公司在机器人领域合作伙伴已达10 余家,主要为国内外行业领军企业。 其他行业中,公司合作客户涵盖无人机、智慧物流、智能仓储、智慧城市等领域。

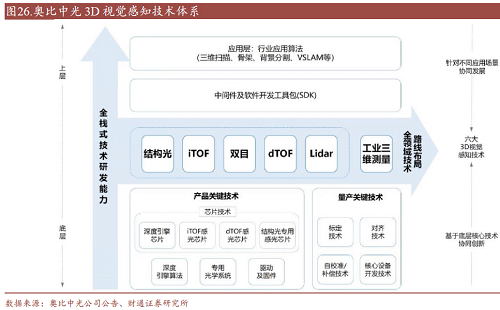
奥比中光:3D 感知全技术路径布局
奥比中光致力于打造机器人的“眼睛”。奥比中光成立于2013 年,于2022 年7 月在科创板上市,获称“3D 视觉第一股”,是行业领先的机器人视觉及AI 视觉科技公司。根据公司官网,其机器人视觉业务在中国服务机器人市场占有率超过70%。
公司主营业务是3D 视觉感知产品的设计、研发、生产和销售,主要产品包括3D视觉传感器(包括单目结构光相机、双目结构光相机、ToF 相机、智能相机、激光雷达等)、消费级应用设备和工业级应用设备。

公司核心技术以自主研发为主,并已形成相应知识产权。公司通过对系统设计、芯片设计、算法研发、光学系统、软件开发、量产技术等关键核心的深入研究,开发出结构光、iToF、双目视觉传感器,及dToF 单线激光雷达、工业三维测量设备,并积极布局面阵dToF、面阵 Lidar 等前沿技术。
保隆科技:传统汽零企业,研发3D视觉顺应智能化方向
保隆科技为传统汽零企业,智能化、轻量化成为新兴业务发展方向。保隆科技于1997 年5 月创立,2017 年在上交所上市。公司传统业务产品包括汽车轮胎压力监测系统(TPMS)、汽车金属管件(轻量化底盘与车身结构件、排气系统管件和EGR管件)、气门嘴以及平衡块、BUSBAR、液冷板和铝外饰件等。新兴业务以智能化、轻量化为方向,产品包括车用传感器(压力、光雨量、速度、位置、加速度和电流类为主)、智能驾驶产品(车载摄像头、车载雷达、控制器与系统解决方案)、 智能主动空气悬架(空气弹簧、储气罐、空气供给单元、电控减振器、悬架控制器以及悬架系统系统集成)。
保隆科技于 2017 年开始研发车载双目摄像头,2019 年实现量产,其 800 万像素三目摄像头在 2024 年已为国内车企量产。另外在非车载的低空飞行器和机器人方面,公司开发出业界最大尺寸的双目系统,是通常双目的三倍大,对机器人和飞行器领域提供了感知支持。
保隆科技立体双目摄像头获得新势力头部车企定点。2024 年 03 月,保隆科技收到某头部新势力车企的《定点通知书》,选择公司作为其全新车型的立体双目摄像头的供应商。根据客户规划,该项目生命周期为 5 年,生命周期总金额近亿元,预计2025 年9 月量产。

海康威视:以视频感知为基础,构建全面感知体系
海康威视以视频感知为基础,构建全面感知体系。海康威视成立于2001 年,以视频感知为基础,构建了包括可见光、热成像、雷达、X 光等电磁波,声波、超声波等机械波,以及多种物理传感技术的全面感知体系。目前公司已有的物联感知产品系列多达数万种,涵盖前端摄像机、音频、传感等多个品类,可实现图像、声音、振动、温度等多维数据的全方位汇聚。
3D 视觉为公司机器视觉业务重点发展方向,包含 RGBD 立体相机、高精度激光轮廓仪等硬件产品。公司下属公司海康机器人主营机器视觉与移动机器人。在机器视觉方面,海康机器人已拥有2D 视觉、智能ID、3D 视觉三大硬件产品线,其中 3D 视觉产品为公司未来发展重点方向,此类产品已初步完成系列化布局,包含 RGBD 立体相机、高精度激光轮廓仪等硬件产品,各方面指标参数均达到与竞品相当的水平。
软件方面,公司自研的VM 算法软件平台为公司长期布局的平台型战略产品,3D 视觉应用平台在机器人无序抓取应用的场景适应性、系统部署设计的便捷性、平台开发的交互性等方面具备一定优势。(参考来源:财通证券研究所)

CIOE智能传感展专注于智能感知技术及应用解决方案, 完整展示3D视觉、激光雷达、工业传感器、毫米波雷达、MEMS传感等传感器产业中的新产品、新技术、新工艺和新应用,聚焦传感在消费电子、智能汽车、机器人、智能制造、通信电子等重要应用领域的新需求。促进传感产业及上下游企业进行商贸沟通,达成商业合作,获悉前沿应用、洞察新兴趋势。